The journey of regaining mobility after a stroke can be arduous, often characterised by the persistence of gait asymmetries and diminished walking endurance. Traditional robotic exoskeletons have offered a partial solution, providing mechanical assistance in structured rehabilitation settings.
However, the inherent variability in stroke-affected gait patterns presents a significant challenge, as many devices struggle to adapt effectively to the unique and often unpredictable movements of individual patients. This rigid approach can inadvertently impede natural joint movements and potentially lead to user discomfort and fatigue, undermining the therapeutic intent.
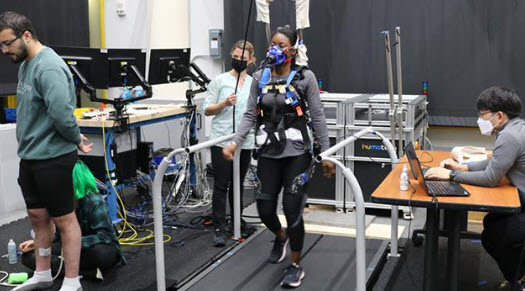
A groundbreaking development emerges from the George W. Woodruff School of Mechanical Engineering at Georgia Tech, where Associate Professor Aaron Young and his research team have pioneered an AI-powered exoskeleton designed to assist lower limb mobility for stroke survivors. Their innovation addresses the limitations of conventional exoskeletons by introducing a system that prioritises user adaptability and intuitive control. The core of this advancement lies in its AI-driven control architecture which is capable of learning and adapting to the user’s specific gait patterns in real-time.
The team’s research, just published in IEEE Transactions on Robotics, focuses on developing a neural network that functions akin to the human brain… processing sensory inputs from the exoskeleton to precisely modulate assistance for each step.
This intelligent system learns a patient’s unique gait within a remarkable timeframe of just one to two minutes, significantly reducing the laborious manual tuning traditionally required by engineers. The AI continuously monitors and adjusts its support, ensuring the exoskeleton remains synchronised even as the patient’s stride shifts or improves. This results in a 70% reduction in errors compared to standard exoskeletons in tracking stroke patients’ walking patterns, marking a substantial leap in precision and responsiveness.
Beyond the immediate benefits observed in the lab, such as reducing the metabolic cost of walking and improving gait efficiency, this technology holds broader implications. The same adaptive approach could prove invaluable for older adults experiencing age-related muscle weakness, individuals with conditions like Parkinson’s or osteoarthritis, and children with neurological disabilities.
Furthermore, the team has addressed the challenge of data interoperability across different exoskeleton systems by developing software that functions as a universal adapter, allowing the AI to integrate with various devices with minimal calibration. This eliminates the need for extensive retraining when switching between exoskeletons, further streamlining the rehabilitation process.
Clinical trials are now underway to rigorously evaluate the exoskeleton’s performance across a wide range of daily activities.